Week 1: Foundations of Statistical Learning
Stat 577 — Statistical Learning Theory
Soumojit Das
Spring 2026
The Learning Problem
What Is Statistical Learning?
The core question: Given data, can we learn patterns that generalize to new observations?
Consider the relationship between inputs \(X\) and outputs \(Y\):
\[Y = f(X) + \varepsilon\]
where:
- \(f\) is some fixed but unknown function
- \(\varepsilon\) is a random error term with \(E[\varepsilon] = 0\)
Statistical learning is the set of approaches for estimating \(f\).
The Theory Behind the Magic
Before diving into formalism, consider what these methods have accomplished:
Cancer Diagnosis
- 20,000 gene expression features
- Only 30–200 patient samples
- Classify tumor types with >95% accuracy
Face Recognition
- MIT’s breakthrough (1990s)
- Thousands of pixel intensities
- Real-time identification
Handwritten Digits
- USPS mail sorting
- 256 grayscale features (16×16 image)
- Human-level performance
Stock Prediction
- Hundreds of economic indicators
- Predict next-period returns
- (With appropriate humility!)
The Common Thread
Each problem has the same structure: learn a function \(f\) from examples. But what is the theory behind such learning algorithms?
A Philosophical Aside
The framework \(Y = f(X) + \varepsilon\) is powerful but not innocent.
Hidden assumptions:
- Additive noise: Real phenomena often have multiplicative or heteroskedastic errors
- \(f\) exists: We’re defining \(f(x) = E[Y|X=x]\) — this is a modeling choice, not a discovery
- \(\varepsilon\) is “error”: Implies there’s a “true” signal to recover — but what if nature is irreducibly stochastic?
The Right Attitude
Treat \(Y = f(X) + \varepsilon\) as a useful fiction — a framework for organizing our thinking, not a claim about reality.
The Ill-Posed Nature of Learning
Given training data, infinitely many functions pass through the same points.
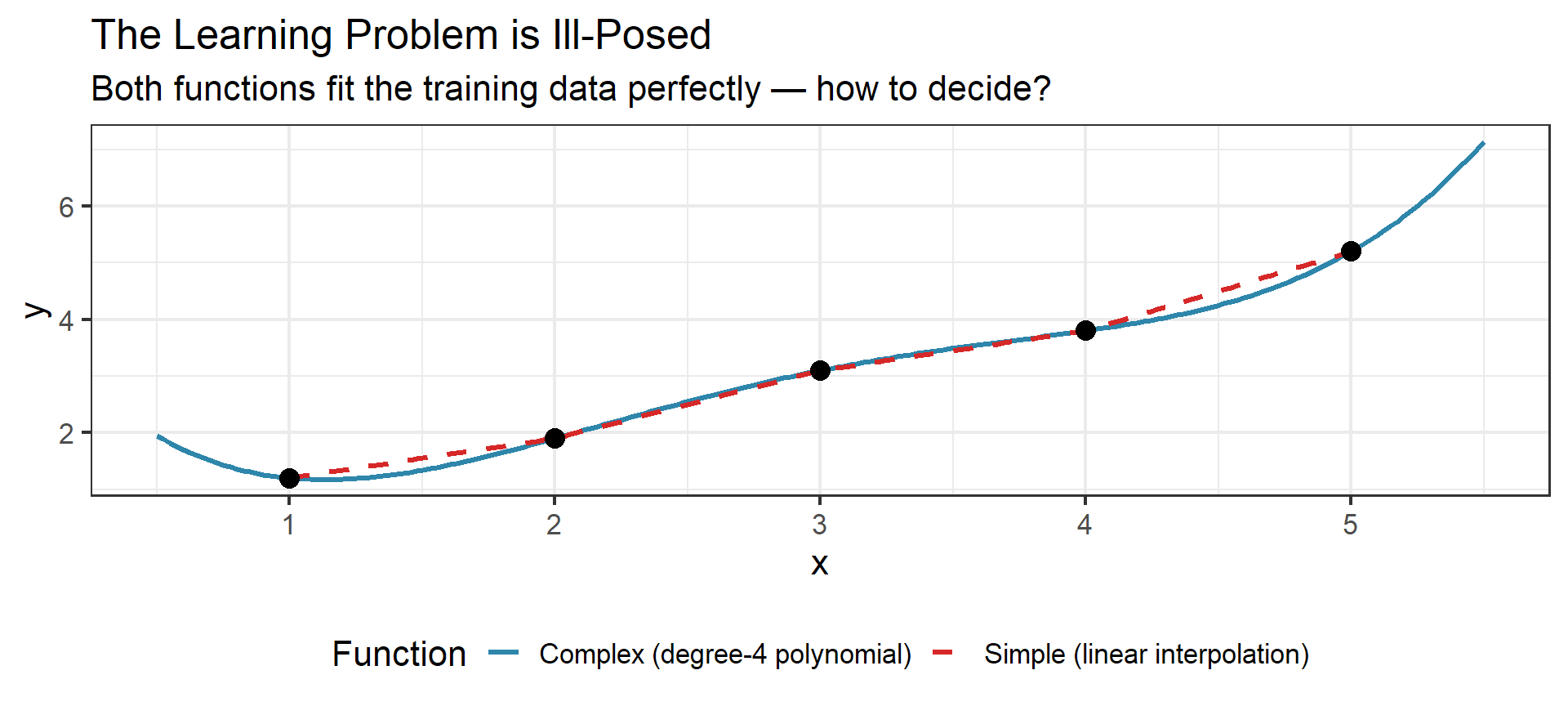
Occam’s Razor
Among all functions that fit the training data, prefer the simplest one.
This isn’t just aesthetic preference — it’s a statistical principle. Complex functions that fit training data perfectly often fail on new data. A good learning algorithm chooses the simplest \(f\) consistent with the evidence.
Why Estimate \(f\)?
Two main goals with different implications:
Prediction: We want \(\hat{Y} = \hat{f}(X)\) to be close to \(Y\)
- Don’t care about the form of \(\hat{f}\)
- Black box is fine if it predicts well
- Example: predicting stock prices, disease risk
Inference: We want to understand how \(X\) affects \(Y\)
- Which predictors are associated with the response?
- What is the relationship (positive/negative, linear/nonlinear)?
- Example: understanding drug effects, policy impacts
The Conflict
These goals can conflict. The best predictive model might be an uninterpretable neural network. The most interpretable model might predict poorly. This tension runs through the entire field.
Supervised vs Unsupervised Learning
Supervised Learning
- Have both \(X\) and \(Y\) for training
- Learn \(f: X \to Y\)
- Regression: \(Y\) is continuous
- Classification: \(Y\) is categorical
Examples: spam detection, house price prediction
Unsupervised Learning
- Have only \(X\), no response \(Y\)
- Find structure in the data
- Clustering: group similar observations
- Dimension reduction: find low-dimensional representation
Examples: customer segmentation, gene expression analysis
Scope
Most of this course focuses on supervised learning. But the boundary is blurry — semi-supervised methods use both labeled and unlabeled data.
No Free Lunch
A Fundamental Principle
“There is no free lunch in statistics: no one method dominates all others over all possible data sets.”
— ISLR, Chapter 2
What this means:
- The “best” method depends on the specific problem
- Linear regression beats neural nets on some datasets; neural nets win on others
- Our job: understand when and why different methods work
This is why we study many methods, not just one. The course is about building a toolkit and knowing which tool to reach for.
Feature Vectors: The Language of Learning Machines
Any object — a patient, an image, a stock — can be summarized as a string of numbers.
The key insight: Once we represent objects as vectors \(\mathbf{x} \in \mathbb{R}^p\), they become points in high-dimensional space.
- Classification becomes: finding a surface that separates points
- Regression becomes: finding a surface that passes through points
- Clustering becomes: identifying clumps of nearby points
Geometrization of Data
Statistical learning is fundamentally geometric. Every method we study is a different way of carving up or smoothing over feature space.
Notation Setup
Our Notation Convention (ISLR/ESL style)
| Symbol | Meaning |
|---|---|
| \(n\) | Sample size (number of observations) |
| \(p\) | Number of predictors/features |
| \(\mathbf{X} \in \mathbb{R}^{n \times p}\) | Design matrix |
| \(\mathbf{y} \in \mathbb{R}^n\) | Response vector |
| \(\mathbf{x}_i \in \mathbb{R}^p\) | Feature vector for observation \(i\) (row of \(\mathbf{X}\)) |
| \((x_i, y_i)\) | \(i\)th observation pair |
| \(\hat{f}\) | Estimated function |
| \(\hat{y}\) | Predicted value |
Loss Functions & Optimal Predictors
Measuring Prediction Error
To evaluate how well \(\hat{f}\) approximates \(f\), we need a loss function \(L(y, \hat{y})\).
Common loss functions:
| Name | Formula | Optimal Predictor |
|---|---|---|
| Squared loss (\(L_2\)) | \((y - \hat{y})^2\) | Conditional mean |
| Absolute loss (\(L_1\)) | \(|y - \hat{y}|\) | Conditional median |
| 0-1 loss | \(\mathbf{1}(y \neq \hat{y})\) | Bayes classifier |
The choice of loss function determines what “optimal” means.
Expected Prediction Error
Definition: Expected Prediction Error (EPE)
For a loss function \(L\) and predictor \(\hat{f}\):
\[\text{EPE}(\hat{f}) = E_{X,Y}[L(Y, \hat{f}(X))]\]
This averages over both the distribution of \(X\) and the conditional distribution of \(Y|X\).
For squared loss, we can decompose EPE pointwise:
\[\text{EPE}(\hat{f}) = E_X\left[ E_{Y|X}[(Y - \hat{f}(X))^2 | X] \right]\]
Optimal Predictor Under Squared Loss
Theorem: The function minimizing EPE under squared loss is the conditional expectation:
\[f^*(x) = E[Y | X = x]\]
Proof sketch: \[E[(Y - c)^2 | X = x] = E[Y^2|X=x] - 2cE[Y|X=x] + c^2\]
Take derivative w.r.t. \(c\), set to zero: \[-2E[Y|X=x] + 2c = 0 \implies c = E[Y|X=x]\]
Intuition
The conditional mean is the “center of mass” of \(Y\) given \(X=x\) — it minimizes the average squared distance.
Optimal Predictor Under Absolute Loss
Theorem: The function minimizing EPE under absolute loss is the conditional median:
\[f^*(x) = \text{median}(Y | X = x)\]
Why Median?
- The median minimizes the sum of absolute deviations
- More robust to outliers than the mean
- Useful when extreme values shouldn’t dominate
Why Use \(L_1\)? Robustness to Outliers
The Lesson
One outlier shifts the mean by 2 but the median by only 0.1.
When outliers are expected (income data, sensor errors, etc.), \(L_1\) loss gives more robust predictions.
The Bayes Classifier (Classification)
For classification with 0-1 loss, the optimal classifier assigns each \(x\) to the most probable class:
\[f^*(x) = \arg\max_{g} P(Y = g | X = x)\]
Bayes Error Rate
The error rate of the Bayes classifier is:
\[R^* = 1 - E_X[\max_g P(Y = g | X)]\]
This is the irreducible error — no classifier can do better.
Hmm, why not use it then?
Problem:
- We don’t know the true (population quantity of interest) \(P(Y = g | X)\) — must estimate it from data (sample).
- Every classification method we study — logistic regression, LDA, k-NN, random forests, neural networks — is just a different way of estimating these posterior probabilities.
- The Bayes Classifier is what we’d use if we had perfect knowledge of the data-generating process.
Visualizing the Bayes Classifier
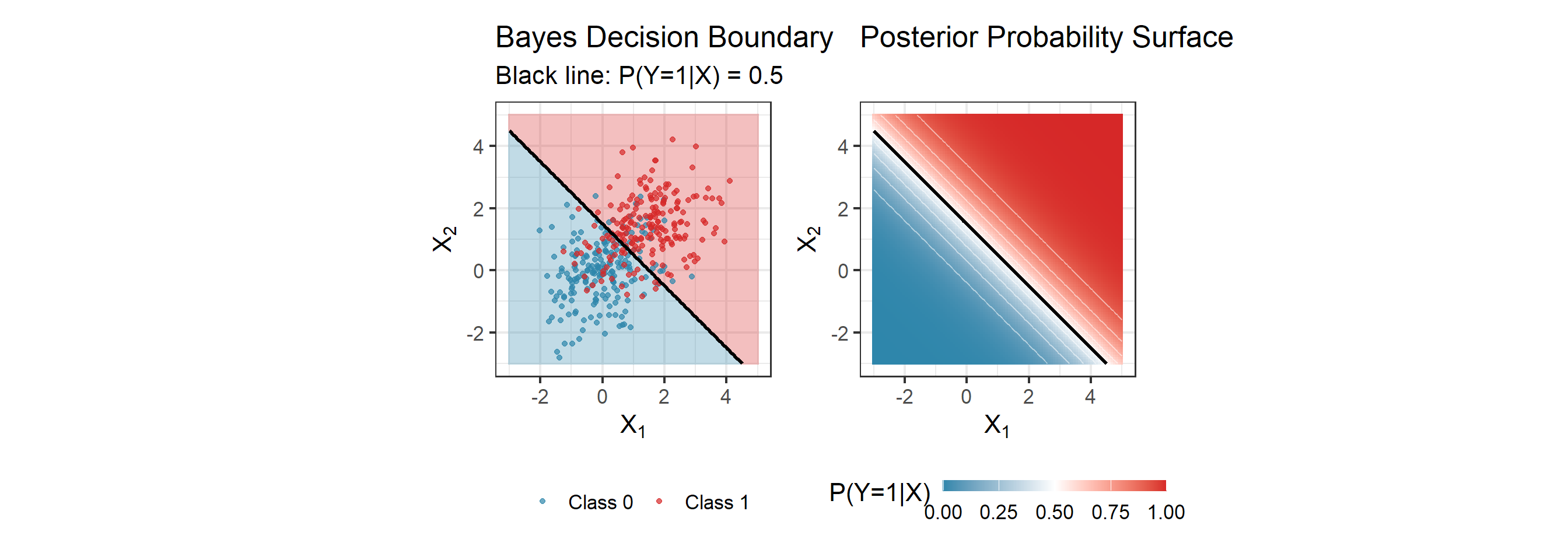
Reading This Plot
- Left: Points near the boundary are hard to classify — even the optimal classifier makes mistakes there
- Right: The gradient shows uncertainty. Near the boundary, \(P(Y=1|X) \approx 0.5\) — maximum uncertainty
- Bayes error: The shaded overlap region where even perfect knowledge of \(P(Y|X)\) leads to errors
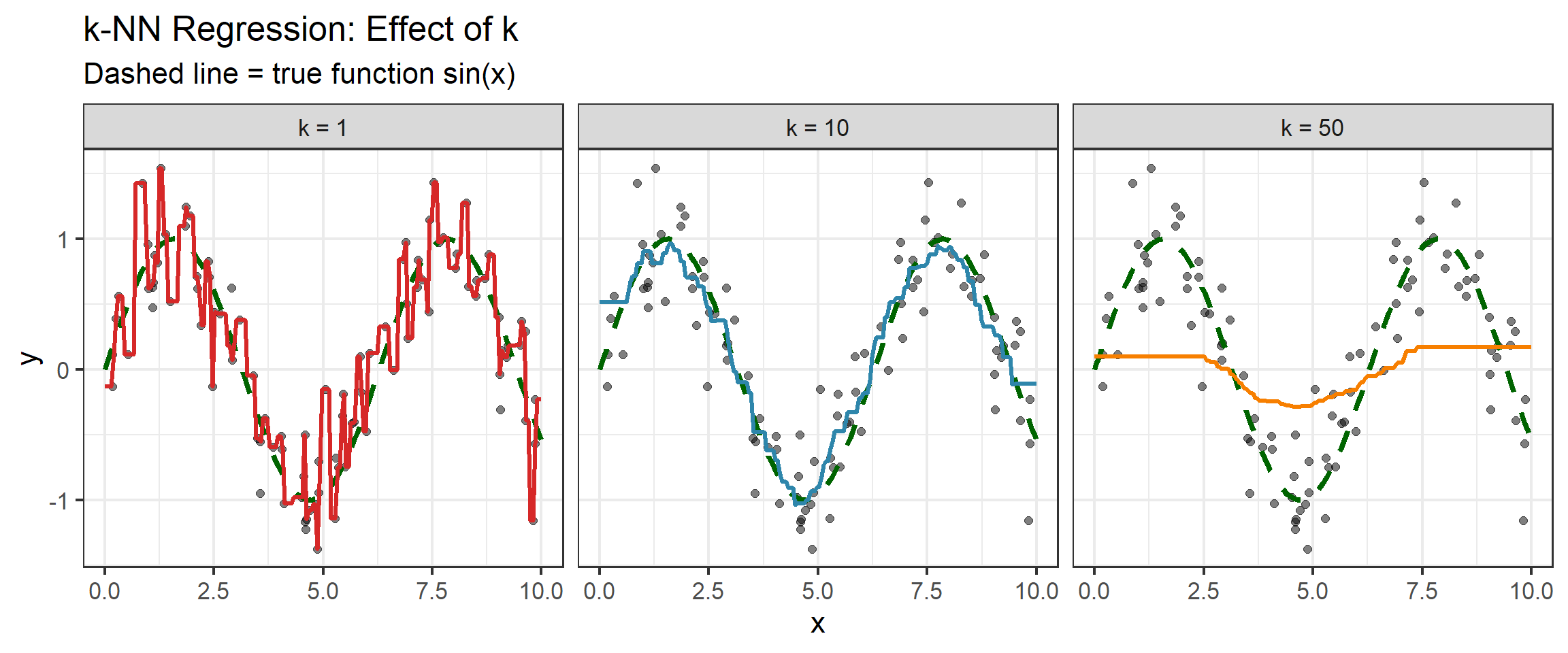
Example: k-Nearest Neighbors
A simple, intuitive approach to estimate \(f(x)\):
- Find the \(k\) training points closest to \(x\)
- For regression: average their \(y\) values
- For classification: majority vote
\[\hat{f}(x) = \frac{1}{k} \sum_{x_i \in N_k(x)} y_i\]
where \(N_k(x)\) is the set of \(k\) nearest neighbors of \(x\).
Key Question
How should we choose \(k\)? This is a model complexity parameter.
k-NN: Effect of \(k\)
k-NN: Practical Considerations
Boundary Effects
At the edges of the data (\(x \approx 0\) or \(x \approx 10\)), k-NN effectively uses a “half-neighborhood” — all \(k\) neighbors come from one direction. This causes:
- Increased bias at boundaries
- Predictions pulled toward the interior
Other practical issues:
- Computational cost: Finding neighbors requires \(O(n)\) comparisons per prediction (or \(O(\log n)\) with KD-trees)
- Feature scaling: Distances depend on units — always standardize!
- Choosing \(k\): Use cross-validation (we’ll formalize this soon)
Two Philosophies: Global vs Local
Linear Regression
“Globally linear”
- Assumes \(f(x) \approx \beta_0 + \boldsymbol{\beta}^T\mathbf{x}\) everywhere
- One model fits all regions of the input space
- Very strong assumption — but stable estimates
- Few parameters to estimate
k-Nearest Neighbors
“Locally constant”
- Assumes \(f(x) \approx\) constant in small neighborhoods
- Adapts to local structure
- Very weak assumption — but noisy estimates
- Effectively uses all data as “parameters”
The Tradeoff Emerges
Strong assumptions (linear) → Lower variance, potentially higher bias
Weak assumptions (k-NN) → Lower bias, higher variance
This tension is the heart of statistical learning.
Where This Course Lives
The methods we study occupy the middle ground between these extremes:
| Method | Structure | Locality | This Course |
|---|---|---|---|
| Linear regression | Global, rigid | None | Week 2 |
| Ridge/Lasso | Global, regularized | None | Week 3 |
| Splines, GAMs | Semi-local, smooth | Moderate | Week 5 |
| Trees, forests | Adaptive partitions | Local | Week 6 |
| SVM | Global (kernel-dependent) | Varies | Week 7 |
| Neural networks | Hierarchical | Learned | Weeks 8–12 |
| k-NN | Local, unstructured | High | Week 1 (today) |
The Course Arc
We’ll build from strong assumptions (linear models) toward flexible methods (neural networks), always asking: what assumptions does this method make, and when do they help or hurt?
Bias-Variance Decomposition
The Fundamental Tradeoff
We’ve seen that linear models make strong assumptions (low variance, potential bias) while k-NN makes weak assumptions (low bias, high variance).
But can we make this precise? What exactly do “bias” and “variance” mean, and how do they affect prediction error?
Imagine we could repeatedly sample training sets and fit \(\hat{f}\).
For a fixed test point \(x_0\), the expected prediction error has three components:
\[E[(Y - \hat{f}(x_0))^2] = \underbrace{\sigma^2}_{\text{Irreducible}} + \underbrace{[\text{Bias}(\hat{f}(x_0))]^2}_{\text{Bias}^2} + \underbrace{\text{Var}(\hat{f}(x_0))}_{\text{Variance}}\]
Key Insight
We cannot minimize bias and variance simultaneously — this is the bias-variance tradeoff.
Derivation: Setting Up
Let \(Y = f(x_0) + \varepsilon\) where \(E[\varepsilon] = 0\) and \(\text{Var}(\varepsilon) = \sigma^2\).
The expected squared error at \(x_0\) (expectation over training data and \(\varepsilon\)):
\[\text{Err}(x_0) = E[(Y - \hat{f}(x_0))^2]\]
Write \(Y - \hat{f}(x_0) = (Y - f(x_0)) + (f(x_0) - \hat{f}(x_0))\)
\[= \varepsilon + (f(x_0) - \hat{f}(x_0))\]
Derivation: Expanding the Square
\[E[(Y - \hat{f}(x_0))^2] = E[(\varepsilon + f(x_0) - \hat{f}(x_0))^2]\]
Expand: \[= E[\varepsilon^2] + 2E[\varepsilon(f(x_0) - \hat{f}(x_0))] + E[(f(x_0) - \hat{f}(x_0))^2]\]
Since \(\varepsilon\) is independent of \(\hat{f}\) and has mean 0:
\[= \sigma^2 + 0 + E[(f(x_0) - \hat{f}(x_0))^2]\]
Derivation: Decomposing the Second Term
Now decompose \(E[(f(x_0) - \hat{f}(x_0))^2]\).
Add and subtract \(E[\hat{f}(x_0)]\):
\[= E[(f(x_0) - E[\hat{f}(x_0)] + E[\hat{f}(x_0)] - \hat{f}(x_0))^2]\]
Let \(a = f(x_0) - E[\hat{f}(x_0)]\) (a constant) and \(b = E[\hat{f}(x_0)] - \hat{f}(x_0)\) (random).
\[= E[(a + b)^2] = a^2 + 2aE[b] + E[b^2]\]
Derivation: Final Result
Note that \(E[b] = E[E[\hat{f}(x_0)] - \hat{f}(x_0)] = 0\).
So: \[E[(f(x_0) - \hat{f}(x_0))^2] = a^2 + E[b^2]\]
\[= (f(x_0) - E[\hat{f}(x_0)])^2 + E[(E[\hat{f}(x_0)] - \hat{f}(x_0))^2]\]
Bias-Variance Decomposition
\[E[(Y - \hat{f}(x_0))^2] = \sigma^2 + \underbrace{[f(x_0) - E[\hat{f}(x_0)]]^2}_{\text{Bias}^2(\hat{f}(x_0))} + \underbrace{\text{Var}(\hat{f}(x_0))}_{\text{Variance}}\]
What Each Term Means
Irreducible Error \(\sigma^2\)
- Noise in the data itself
- Cannot be reduced
- Sets a floor for prediction error
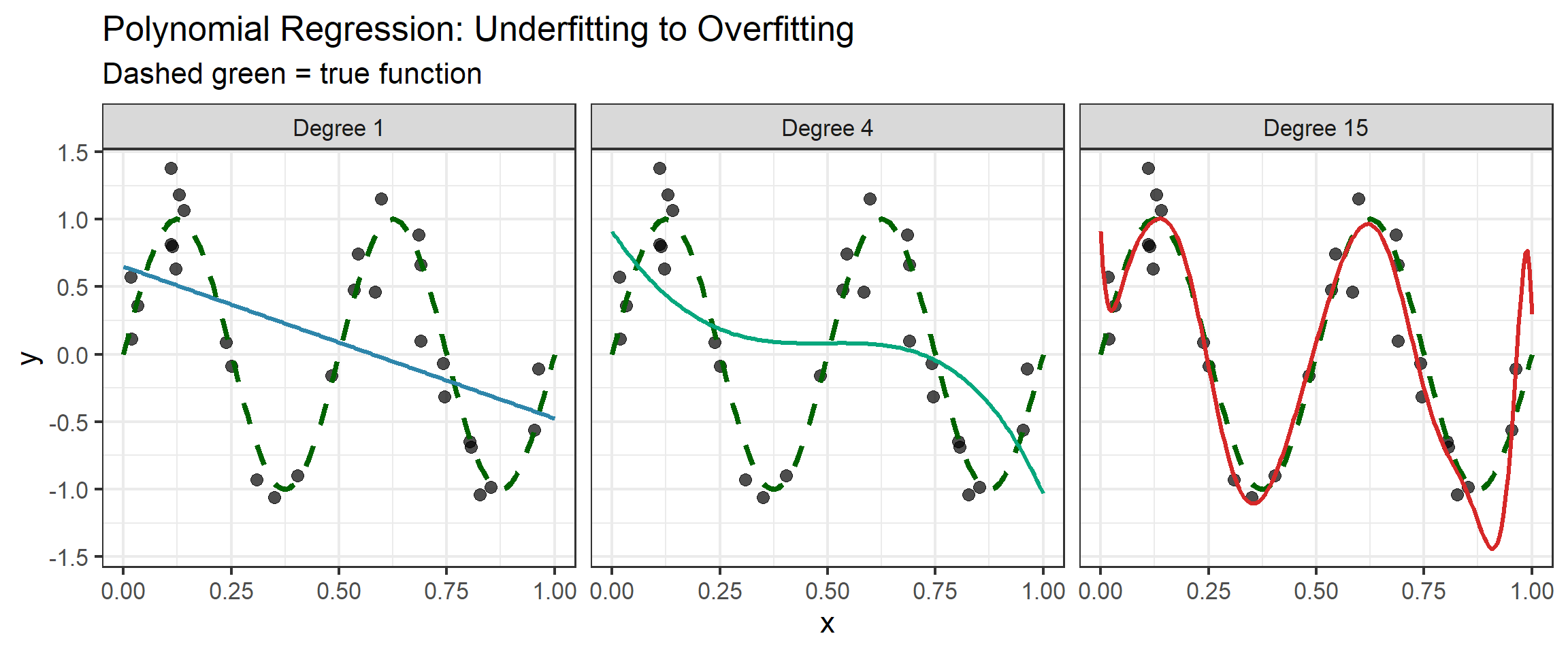
Bias\(^2\)
- Error from wrong model assumptions
- Simple models → high bias
- “Underfitting”
Variance
- Sensitivity to training data
- Complex models → high variance
- “Overfitting”
The Tradeoff
- More flexible models: lower bias, higher variance
- Less flexible models: higher bias, lower variance
- Goal: find the sweet spot
But…
This U-shaped picture is a mental model, not a theorem. Double descent (Week 8) shows the story is richer. The bias-variance decomposition is a framework for thinking, not a universal law.
The Dartboard Analogy
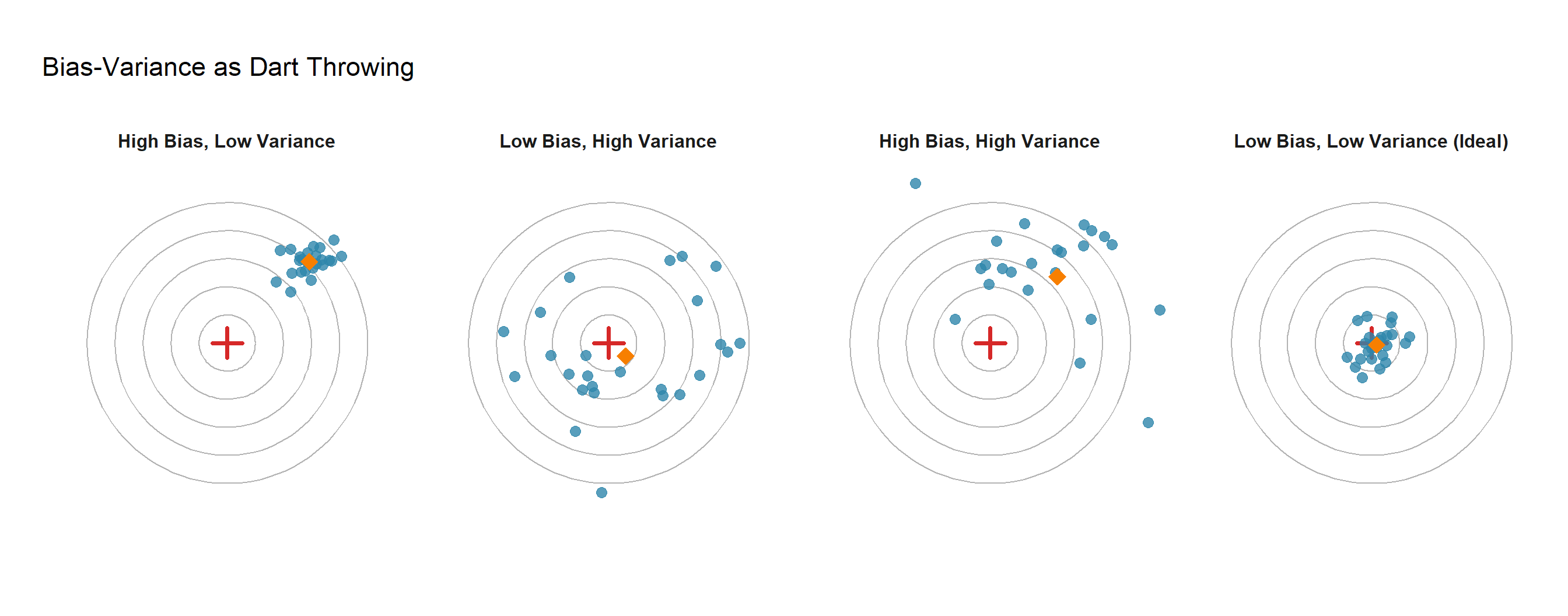
The Analogy
- Bias = How far is your average throw from the bullseye? (Systematic error)
- Variance = How spread out are your throws? (Consistency)
- Goal = Low bias AND low variance (rightmost panel)
The U-Shaped Test Error Curve
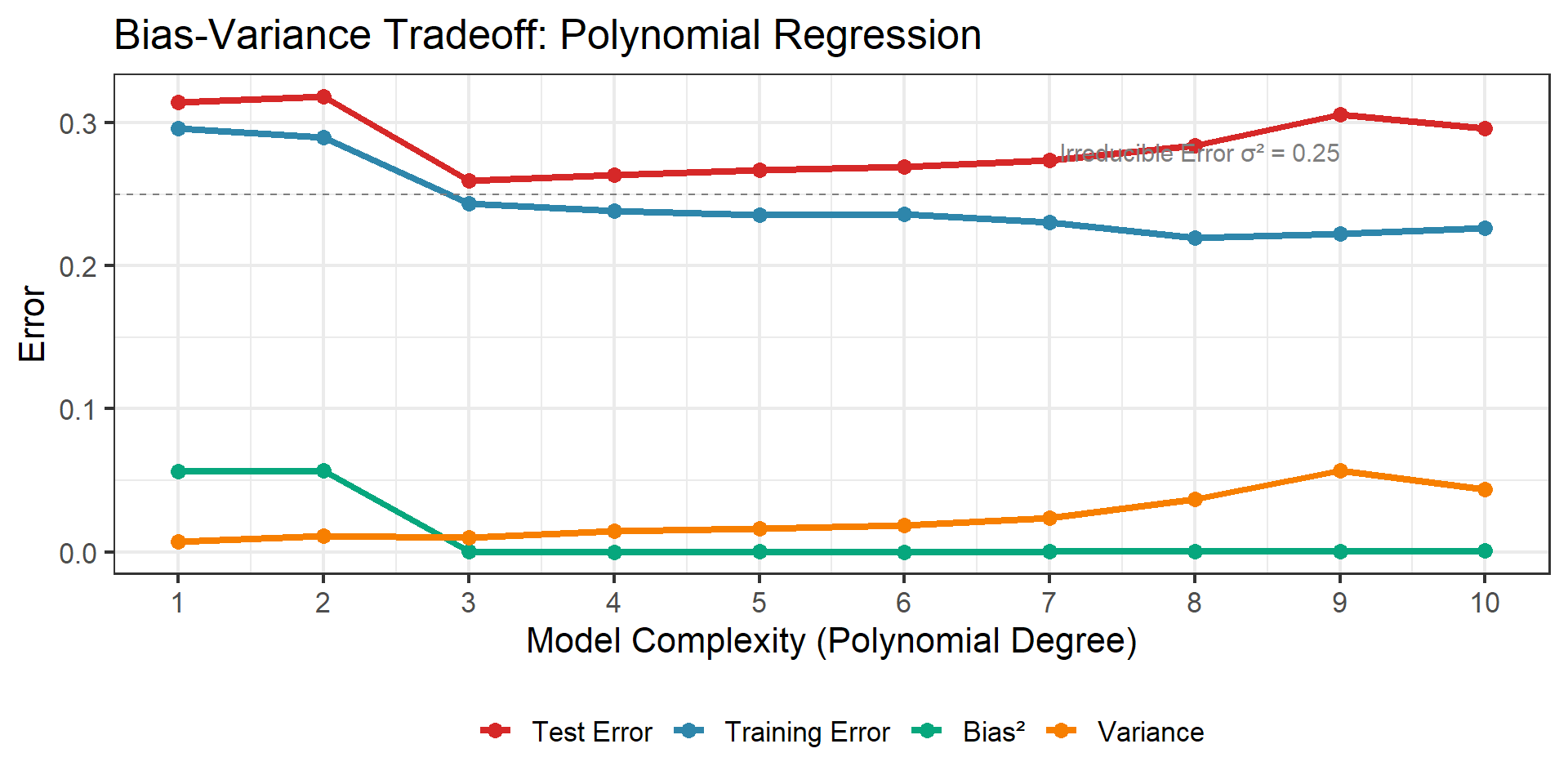
Training Error vs Test Error
Training Error
- Computed on data used to fit model
- Always decreases with complexity
- Optimistic estimate of true error
- Can reach zero with enough flexibility
Test Error
- Computed on new, unseen data
- U-shaped curve
- Minimum at optimal complexity
- This is what we actually care about!
Key Lesson
Never use training error to select model complexity!
Polynomial Fitting Demo
Curse of Dimensionality
The High-Dimensional Challenge
As dimension \(p\) increases, our intuition about space breaks down.
The problem: Local methods (like k-NN) assume we can find “nearby” points.
In high dimensions:
- Data becomes sparse
- “Nearby” points aren’t so near
- Local neighborhoods become global
This Isn’t Hypothetical
Consider real applications we mentioned earlier:
| Application | Dimension \(p\) | Typical Sample Size \(n\) |
|---|---|---|
| Gene expression (cancer) | 5,000 – 20,000 | 30 – 200 |
| Face recognition | 10,000+ (pixels) | 100 – 1,000 |
| Text classification | 50,000+ (vocabulary) | 1,000 – 10,000 |
| Financial indicators | 100 – 1,000 | 250 (trading days/year) |
The Uncomfortable Reality
In most modern applications, \(p \gg n\) — we have far more features than observations.
Classical statistics (designed for \(n \gg p\)) doesn’t directly apply. This is where statistical learning theory becomes essential.
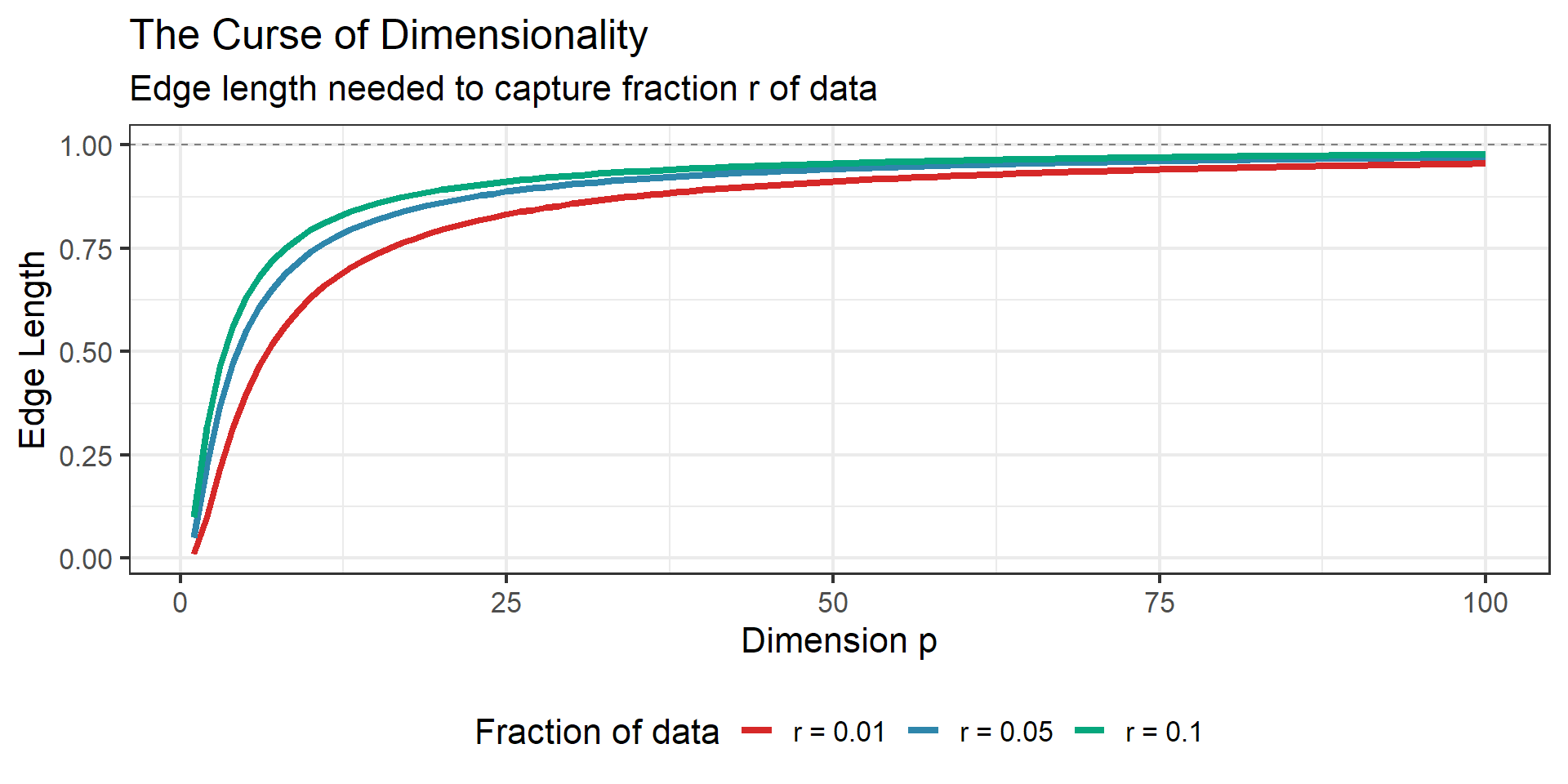
Edge Length to Capture \(r\) Fraction of Data
Consider data uniformly distributed in a \(p\)-dimensional unit hypercube.
To capture a fraction \(r\) of the data in a hypercubic neighborhood centered at a point, we need edge length:
\[e_p(r) = r^{1/p}\]
| Dimension \(p\) | Edge length for \(r = 0.01\) | Edge length for \(r = 0.1\) |
|---|---|---|
| 1 | 0.01 | 0.10 |
| 2 | 0.10 | 0.32 |
| 10 | 0.63 | 0.79 |
| 100 | 0.955 | 0.977 |
The Curse
In high dimensions, even small neighborhoods span most of the data range!
Visualizing the Curse
Why Local Methods Struggle
In low dimensions:
- k nearest neighbors are genuinely local
- Can estimate \(f(x)\) by averaging nearby points
- Works well for smooth functions
In high dimensions:
- “Nearest” neighbors may be far away
- Neighborhoods become nearly as large as the whole space
- Effectively averaging over dissimilar points
Sample size requirement: To maintain constant density of points, need \(n = O(c^p)\) samples!
How Bad Is It? A Calculation
Suppose we want training points dense enough that the nearest neighbor is within 1% of each axis (linear density = 100).
Required sample size:
| Dimension \(p\) | Required \(n = 100^p\) |
|---|---|
| 1 | 100 |
| 2 | 10,000 |
| 5 | 10 billion |
| 10 | \(10^{20}\) (more than atoms in a gram of matter) |
The Fundamental Lesson
In high dimensions, there is no substitute for assumptions.
We cannot simply “collect more data” — the required sample size grows exponentially. Instead, we must impose structure: linearity, sparsity, smoothness, or low intrinsic dimension.
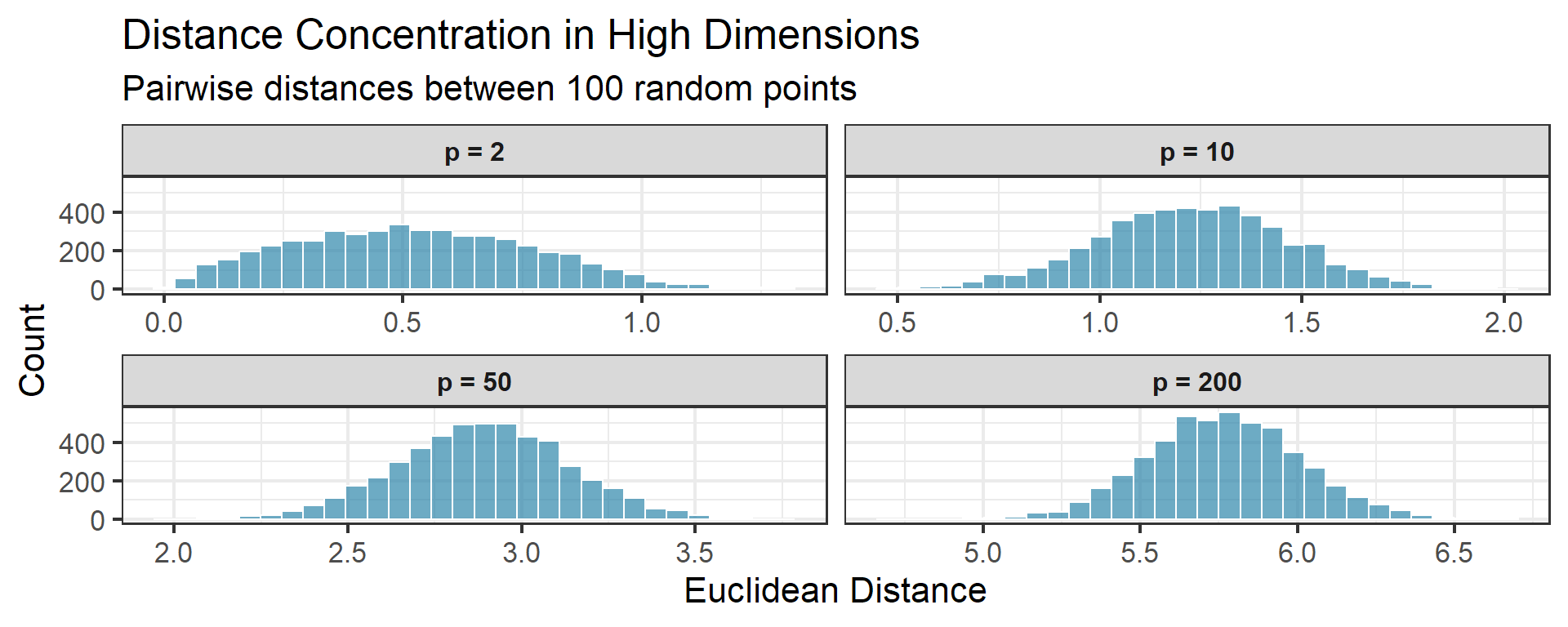
Distance Concentration
An even stranger phenomenon: in high dimensions, all pairwise distances become nearly equal.
For \(n\) points uniformly distributed in the unit hypercube:
\[\frac{d_{\max} - d_{\min}}{d_{\min}} \to 0 \quad \text{as } p \to \infty\]
Implication
If all points are equidistant, the concept of “nearest neighbor” becomes meaningless!
Volume of a Hypersphere
Another perspective: the volume of a unit ball shrinks rapidly.
Volume of unit ball in \(p\) dimensions:
\[V_p(1) = \frac{\pi^{p/2}}{\Gamma(p/2 + 1)}\]
| Dimension \(p\) | Volume |
|---|---|
| 2 | \(\pi \approx 3.14\) |
| 3 | \(\frac{4\pi}{3} \approx 4.19\) |
| 10 | \(\approx 2.55\) |
| 20 | \(\approx 0.026\) |
| 100 | \(\approx 10^{-40}\) |
Most of the “volume” is in the corners of the hypercube!
Concentration of Measure
Perhaps the most counterintuitive result: most of a high-dimensional sphere’s volume is near its surface.
For a unit ball in \(p\) dimensions, the fraction of volume within distance \(\epsilon\) of the surface is:
\[\text{Fraction in shell} = 1 - (1 - \epsilon)^p \approx 1 - e^{-p\epsilon} \text{ for large } p\]
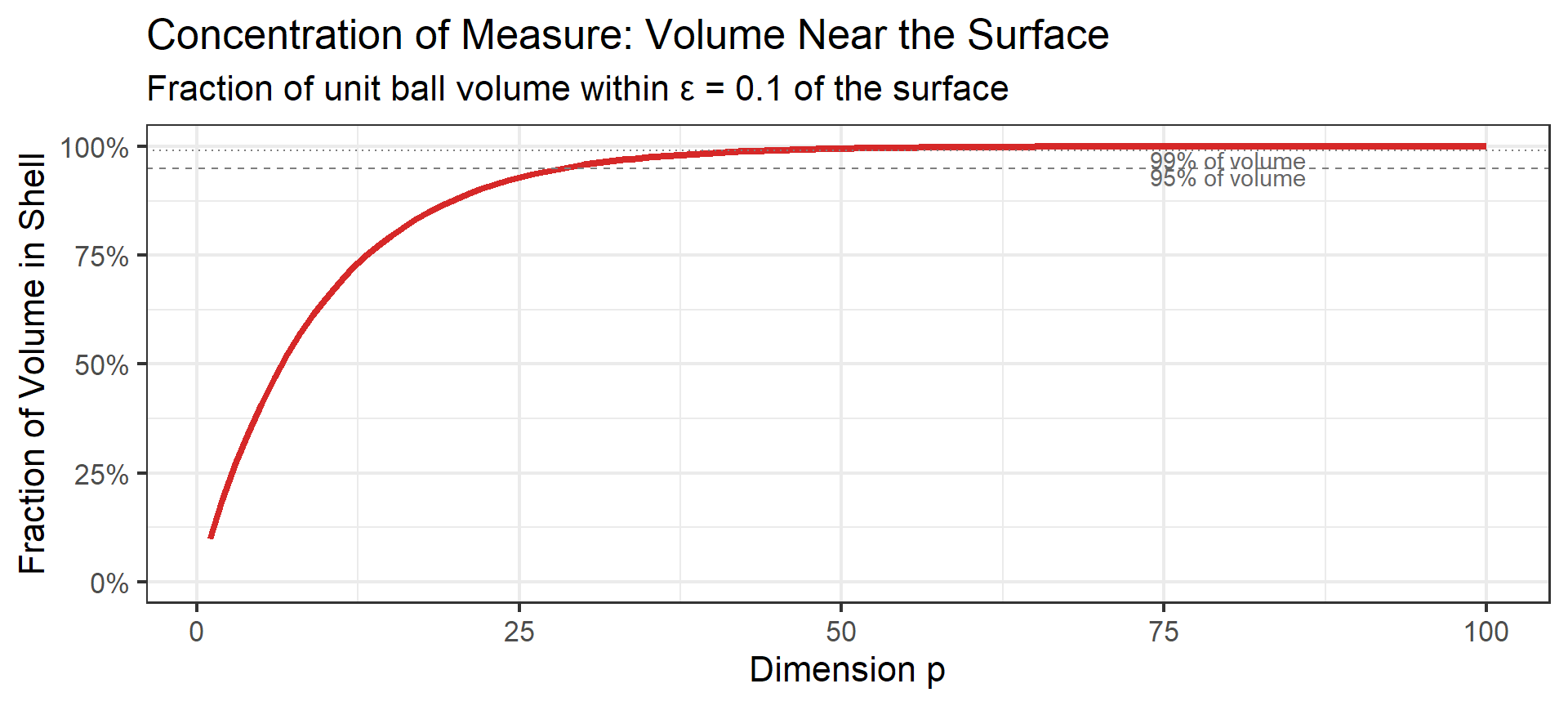
What This Means
In high dimensions:
- Almost all random points lie near the “edge” of any bounded region
- The “interior” is essentially empty
- Uniformly distributed points don’t fill space — they concentrate on the boundary
This is why sampling in high dimensions feels fundamentally different.
What Can We Do?
The curse of dimensionality tells us we need assumptions to learn in high dimensions.
Common structural assumptions:
- Smoothness: \(f\) doesn’t change too rapidly
- Sparsity: Only a few predictors matter
- Low intrinsic dimension: Data lies on a lower-dimensional manifold
- Linearity: \(f\) is approximately linear
Key Insight
Statistical learning is about choosing the right structural assumptions for your problem.
Preview: Modern Phenomena
Beyond the Classical View
The bias-variance tradeoff suggests: don’t overfit!
Classical advice:
- Use fewer parameters than data points
- Regularize heavily
- Stop before fitting noise
But modern deep learning:
- Uses millions of parameters
- Often fits training data perfectly
- Still generalizes well!
What’s going on?
Double Descent
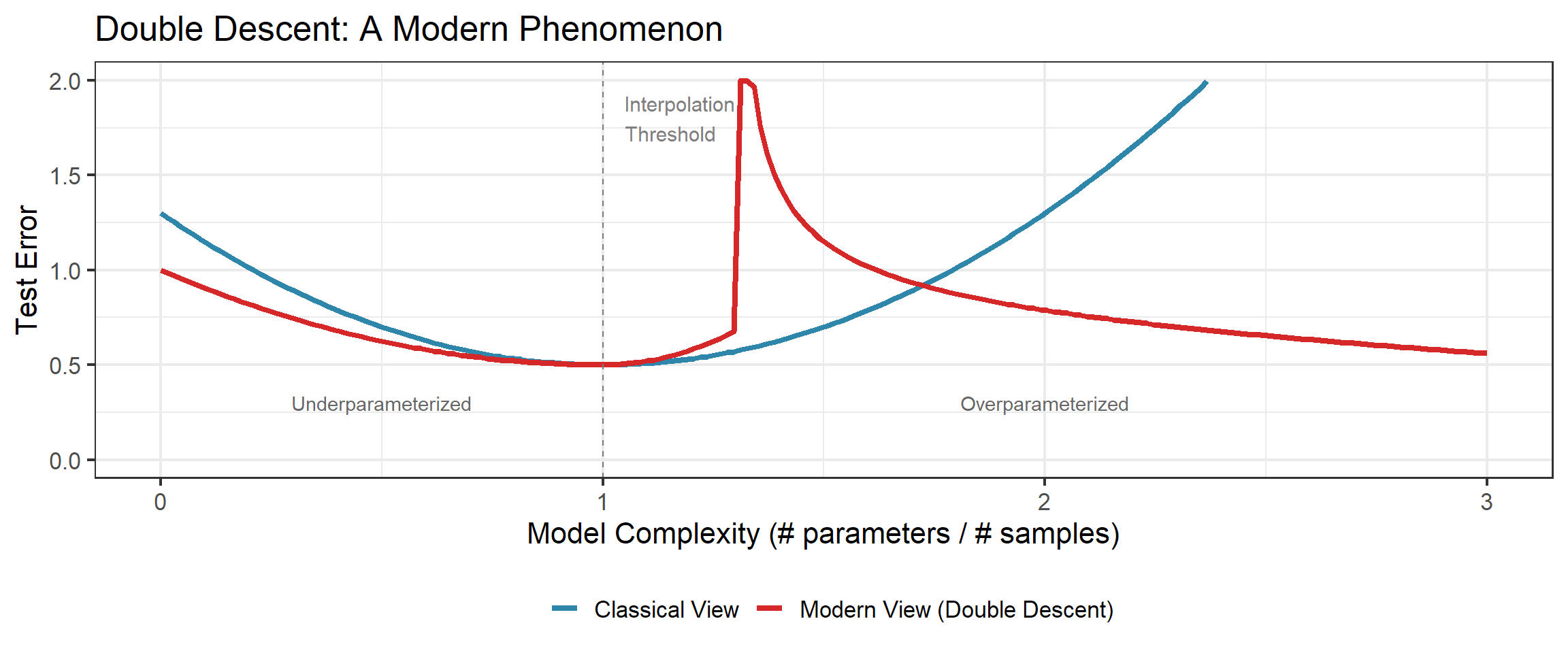
What Is Double Descent?
The Phenomenon
Test error can decrease again after the interpolation threshold — when models have enough capacity to perfectly fit training data.
Three regimes:
- Underparameterized: Classical bias-variance tradeoff applies
- Interpolation threshold: Peak error (barely enough capacity)
- Overparameterized: Error decreases again!
We’ll revisit this in Week 8 (Neural Networks).
Why Does Overparameterization Help?
Several (still debated!) explanations:
Implicit regularization: Gradient descent finds “simple” solutions even in overparameterized models
Multiple interpolating solutions: With many parameters, some that fit training data also generalize
Smoothness: Overparameterized models can be smoother than barely-fitting ones
Open Question
We don’t fully understand this yet! Active area of research.
Summary
Key Takeaways
Feature vectors are the language of learning machines — any object becomes a point in high-dimensional space
The learning problem is ill-posed — many functions fit the data; Occam’s razor says prefer the simplest
Loss functions define what “optimal” means:
- Squared loss → conditional mean
- Absolute loss → conditional median (robust to outliers)
- 0-1 loss → Bayes classifier
Bias-variance decomposition: \[\text{EPE} = \sigma^2 + \text{Bias}^2 + \text{Variance}\]
Curse of dimensionality: In high dimensions (\(p \gg n\)), local methods fail — we need structural assumptions
Modern twist: Double descent shows the story is richer than the classical U-curve — stay curious!
Looking Ahead
Next week: Linear Models & Least Squares
- The workhorse of statistical learning
- Matrix formulation and geometry
- Hat matrix and projection interpretation
- Gauss-Markov theorem (proof sketch)
- Distributional properties
Preparation:
- Read: ISLR Chapter 3
- Optional: ESL 3.1-3.2